Link to paper The full paper is available here.
You can also find the paper on PapersWithCode here.
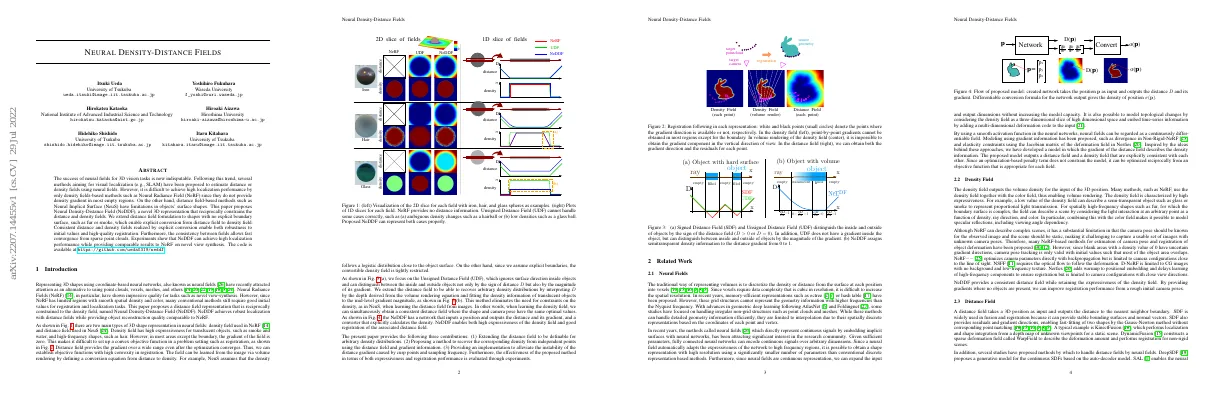
Abstract Neural fields have been used for 3D vision tasks Several methods have been proposed to estimate distance or density fields using neural fields Neural Radiance Field (NeRF) does not provide density gradient in most empty regions Neural Implicit Surface (NeuS) has limitations in objects’ surface shapes This paper proposes Neural Density-Distance Field (NeDDF) to reciprocally constrain the distance and density fields NeDDF enables explicit conversion from distance field to density field Experiments show NeDDF can achieve high localization performance Paper Content Introduction Representing 3D shapes using coordinate-based neural networks Neural Radiance Fields (NeRF) have shown impressive quality for tasks such as novel view-synthesis Proposed Neural Density-Distance Field (NeDDF) achieves robust localization with distance fields while providing object reconstruction quality comparable to NeRF Two main types of 3D shape representation in neural fields: density field and distance field Distance field provides gradient over a wide range even after optimization converges NeDDF has a network that inputs a position and outputs the distance and its gradient, and a converter that explicitly calculates the density Three contributions: extending the distance field, recovering corresponding density, and implementation to alleviate instability of distance gradient Neural fields Traditional way of representing volumes is to discretize density or distance into voxels Memory-efficient representations such as octree or hash table have been proposed Geometric deep learning methods can handle irregular non-grid structures Neural fields can model output dimensions without increasing model capacity Modeling using gradient information has been proposed Density field Density field outputs volume density for 3D position Used with color field to enable volume rendering Low density value can describe semi-transparent objects Can model specular reflections NeRF has limitation of known camera pose and static scene Many NeRF-based methods proposed to address this Blank areas with density value of 0 have uncertain gradient directions NeDDF provides consistent distance field while retaining expressiveness of density field Can improve registration performance from rough initial camera poses Distance field Distance field takes 3D position as input and outputs distance to nearest boundary Widely used in fusion and registration because provides stable surfaces and normal vectors Provides residuals and gradient directions for fast-fitting of two shapes KinectFusion and DynamicFusion use SDF for localization and shape integration DeepSDF, SAL, UDF, IDR, UNISURF, VolSDF, NeuS use neural fields to handle distance fields This study extends distance field to correspond to various density distributions from depth values Method Distance and density fields are considered Distance field is redefined to interpret arbitrary density fields Conversion formula is introduced to obtain density of independent points from distance and gradient of distance value Distance field from density field Distance field in boundary surfaces describes the distance to the nearest surface for a given location....